

 موتور براشلس
موتور براشلستعریف
کوادکوپتر چیست؟

نوعی پهپاد (پرنده هدایت پذیر از دور) که عموما دارای ۴ موتور (گاهی هم ۶ یا ۸ موتوره) است و برای امور متفاوتی استفاده می شود. از معروف ترین کاربرد کوادکوپترها، استفاده در تصویر برداری است. کوادکوپتر هایی که برای تصویر برداری استفاده میشوند، عموما با نام هلیشات شناخته شده اند. اگر به عکاسی و یا فیلم برداری با هلی شات علاقه دارید در ادامه با ما باشید…
توجه کنید، تصویر برداری فقط یکی از چندین کاربرد های کوادکوپتر است. از دیگر کاربردها میتوان به موارد تفریحی و سرگرمی اشاره کرد.
کوادکوپتر یکی از بهترین سرگرمی ها برای کودکان و نوجوانان و حتی بزرگسالان است. بدون شک همگی ما آرزوی خلبان شدن را در کودکی داشته ایم. برای به واقعیت تبدیل شدن این آرزو، کافی است از پرنده های های تفریحی استفاده کنیم.
همه ما میتوانیم بدون داشتن دانش خلبانی، تجربه پرواز و کنترل کردن اجسام پرنده را داشته باشیم. اگر میخواهید آرزوی پرواز را برای عزیزانتان برآورده کنید، کوادکوپتر های تفریحی بهترین گزینه برای هدیه دادن هستند
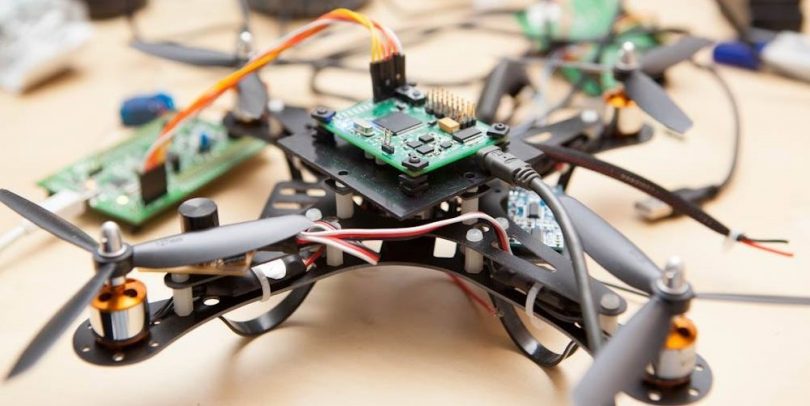
قطعات
بدنه کوادکوپتر
کوادکوپتر ها عموما شامل قسمت اصلی و بازو ها است. بدنه کوادکوپتر ها در عین سبک بودن بسیار مقاوم است و اکثرا از جنس آلومینیوم یا پلاستیک مقاوم (ABS یا فیبر کربن) ساخته میشوند.
موتور

موتور بر روی بازو ها قرار میگیرند و به سه نوع تقسیم میشوند:
- براشلس(Brushless): موتورهای براشلس برای کوادکوپترهای حرفهای استفاده میشود و پیشرفتهترین کوادکوپترها از موتورهای براش استفاده میکنند. موتور براشلس فاقد برس است.
- براش(Brushed): موتور براش هسته مرکزی دارد و برسهایی برای تغییر قطب های N و S در آن طراحی شده است.
- کورلس(Coreless): سادهترین نوع موتور پهپاد کورلس است که هسته مرکزی ندارد و زیر مجموعهی موتورهای براش میباشند.
ملخ

در کوادکوپتر ملخ ها بر روی موتور ها قرار میگیرند. جهت حرکت در ملخ ها مختلف است. آنها در دو حالت دمنده (pusher) و مکنده (puller) حرکت میکنند.
باتری
انرژی مورد نیاز برای پرواز توسط باتری تامین می شود که عموما از نوع لیتیوم پلیمری می باشد.
رادیو کنترل کوادکوپتر
رادیو کنترل این امکان را به شخص می دهد که کوادکوپتر را از راه دور کنترل کند. فرکانس های رادیویی از طریق فرستنده که در دست شخص است و کوادکوپتر را هدایت میکند، ارسال میشود و از طریق گیرنده ای که در کوادکوپتر قرار دارد دریافت میشود.
کنترل کننده پرواز (Flight Controller)
مغز کوادکوپتر ها فلایت کنترلر است. برد الکترونیکی کوچکی که شامل ماژول های مختلف است و عملکرد سایر اجزا را مستقیما تحت تاثیر قرار می دهد.
GPS
یک سیستم رادیویی است که امکاناتی مانند برگشت به خانه، خلبان خودکار و … را فراهم میکند. بهتر است هنگام خرید کوادکوپتر مدلهایی را انتخاب کنید که سیستم جی پی اس روی آنها نصب شده است.
قطب نما
قطب نما به منظور تعیین جهت مورد استفاده قرار می گیرد و اطلاعات لازم را در اختیار کنترل کننده پرواز قرار می دهند.
FPV (تکنولوژی ارسال تصویر)
خلاصه عبارت First Person View به معنای دید اول شخص است. کوادکوپتر هایی که دارای این ویژگی هستند امکان ارسال لحظهای تصاویر را دارند. این تکنولوژی با wifi کار می کند ولی برد خیلی بیشتری از وای فای دارد!
بارومتر (Barometer) برای تنظیم ارتفاع
سنسور بارومتر (فشارسنج) به منظور اندازه گیری ارتفاع پرواز پهباد مورد استفاده قرار می گیرد. این سنسور همانطور که از نام آن مشخص است، با اندازه گیری فشار هوا می تواند ارتفاع از سطح دریا را تخمین بزند.
سایر مشخصات
ژیروسکوپ یا سنسور جایرو کوادکوپتر
تعادل پرنده مربوط به این سنسور می باشد. ژیروسکوپ حتی در معمولی ترین پهباد ها نیز یک سنسور حیاتی به حساب می آید و وجود آن بسیار مهم است. سنسور ژیروسکوپ میزان تغییرات زاویه ای به وجود آمده را در حرکت های چرخشی روی سه محور (x,y,z) اندازه گیری می کند و در نتیجه کوادکوپتر چرخش هایی بدون نقص خواهد داشت.
کوادکوپتر وسیلهی نقلیه نسبتا ساده مجهز به ۴ ملخ روی ۴ بازو میباشد. این وسیله با یک موتور الکتریکی کار میکند. البته باید گفت پرندههایی با سه، شش یا هشت بازو نیز وجود دارند اما اصل کوادکوپتر مبتنی بر همان چهار بازو (دو بازو در عقب و دو بازو درجلو) میباشد. ۲ ملخ کوادکوپتر در جهت چرخش ساعت حرکت میکنند و ۲ ملخ دیگر در خلاف جهت چرخش ساعت حرکت میکنند. کوادکوپترها از لحاظ طراحی بدنه، کاملا غیر آیرودینامیک هستند و برای حفظ تعادل و پرواز به یک کامپیوتر نیازمند هستند تا دستورات ورودی را به فرمان های حرکتی تغییر دهد. این پاسخ کوتاهی به سوال ابتدایی بود. در ادامه اطلاعات تکمیل تری در خصوص کوادکوپترها عنوان میکنیم.
کوادکوپترها با هلیکوپترها و یا هواپیماها کاملا متفاوت هستند. در یک هواپیما وظیفه حرکت و تغییر جهت به عهده بالها میباشد اما در کوادکوپترها این وظیفه به عهده ملخها میباشد. هلیکوپتر نیز از ملخ اصلی و مرکزی خودش برای تولید نیروی بالابر استفاده میکند. اما کوادکوپترها با کمک ۴ ملخ و کامپیوتر توانایی پرواز و تولید نیروی بالابر را دارند.
مفهوم کوادکوپتر، مفهوم جدیدی نیست! ایده های اولیه کوادکوپترها در سال های ۱۹۲۰ و ۱۹۳۰ ظاهر شد، اما آن طراح های اولیه عملکرد بد، سطح بالایی از بی ثباتی و نیاز به دقت فوقالعاده زیاد و اعمال دستورات متعدد از طرف خلبان داشتند. پیشرفت تکنولوژی الکترونیکی در خصوص رایانههای کنترل پرواز، موتور های بدون هسته و بدون برس، ریز پردازندهها، باتری ها، شتاب سنج ها، دوربین ها و حتی سیستم های GPS، امکان پرواز به شیوه اکنون کوادکوپترها را ایجاد نمود. سادگی کوادکوپتر های کنونی حتی آن ها را گزینه مناسبی برای تصویر برداری هوایی کرده است.
ادامه…
رادیوکنترل
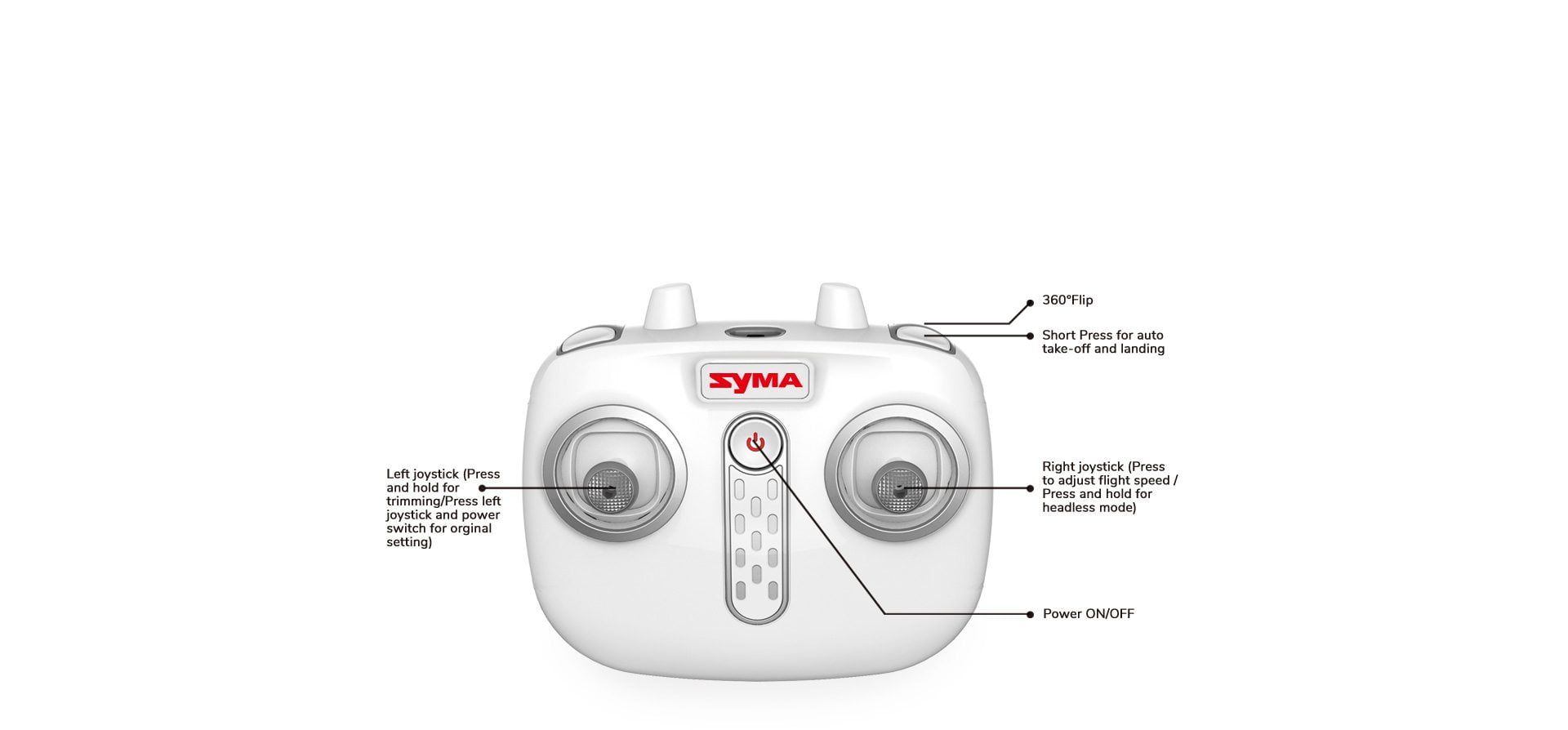
همیشه همراه یک کوادکوپتر معمولی یک کنترل کننده ۴ کاناله وجود دارد که دستورات را برای کوادکوپتر ارسال میکند تا به خوبی در آسمان حرکت کند. فرکانس ارتباطی که اکثر کنترل کنندهها از آن استفاده میکنند، ۲.۴ گیگاهرتز است. این فرکانس یکی از معمولی ترین فرکانس های موجود است که حتی برای اتصالات Wifi نیز به کار میرود. کنترل کننده ها حداقل دارای ۴ دکمه اصلی هستند که به شما اجازه میدهند تا اصلاحات مورد نیاز را به رفتار پرنده در آسمان وارد نمایید.
ملخ ها در کواد کوپتر

در خصوص کوادکوپتر ها همیشه این مسئله را به یاد داشته باشید که دو مجموعه ملخ و موتور درون آنها وجود دارد که در جهت مخالف هم کار میکنند. پس اگر شما این مجموعه پروانه ها را تغییر دهید، کوادکوپتر به جای اوج گرفتن! به سمت زمین حرکت خواهد کرد! تغییر دادن ملخ ها باعث میشود به جای تولید نیروی رو به بالا، نیروی رو به پایین ایجاد شود.
موتور کوادکوپتر (براش – براشلس)
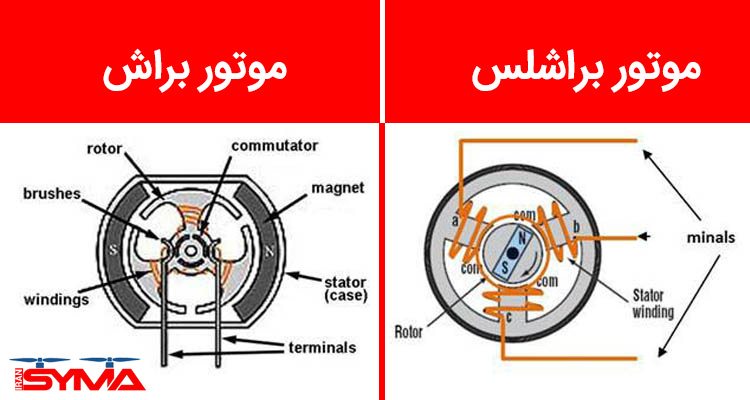
موتور های کلیه کواد کوپتر های تولید شده تا کنون الکتریکی هستند . در کلیه موتورهای الکتریکی براش قطعه ای به نام برس وجود دارد که کار آن اتصال جریان برق به بخشی که بر روی سیم پیج مورد نیاز است می باشد . در موتورهای براشلس وظیفه زمانبندی برای اتصال نیروی الکتریکی ، بر عهده واحد ESC یا تنظیم سرعت می باشد . عمر موتورهای براشلس بعلت نداشتن قطعه مصرفی برس بسیار بالاست ولی قیمت آنها نیز در مقایسه با موتورهای براش بسیار بالا می باشد .
از منظری دیگر ، موتور براش با تغییر ولتاژ ، سرعتش تغییر می کند ولی در موتور براشلس این امر بر عهده واحد ESC می باشد .
نتیجه: همانگونه که از نام موتور ” brushed & brushless” برداشت می شود ، تفاوت اساسی در بودن و یا نبودن قطعه برس است.
شناور شدن در آسمان
باید نیروی بالابرنده از نیروی جاذبه زمین بیشتر باشد تا کواد به توانایی پرواز دست یابد. این مسئله توسط حرکت همزمان و تولید نیرو توسط هر ۴ ملخ کواد میباشد. برای کاهش ارتفاع نیز میبایست هر ۴ ملخ به صورت همزمان در چرخش خود کاهش ایجاد نمایند. این کارها به پیچدگی که میخوانید نیست! در واقع برای کنترل این پرنده به بالا و یا پایین کافی است تا اهرم های موجود روی رادیوکنترل آن را به سمت بالا یا پایین هل دهید تا پرنده حرکت مورد نیاز شما را اعمال کند. گفتنی است که از اهرم ها برای حرکت پرنده به طرفین نیز استفاده میشود.
حرکت کوادکوپتر
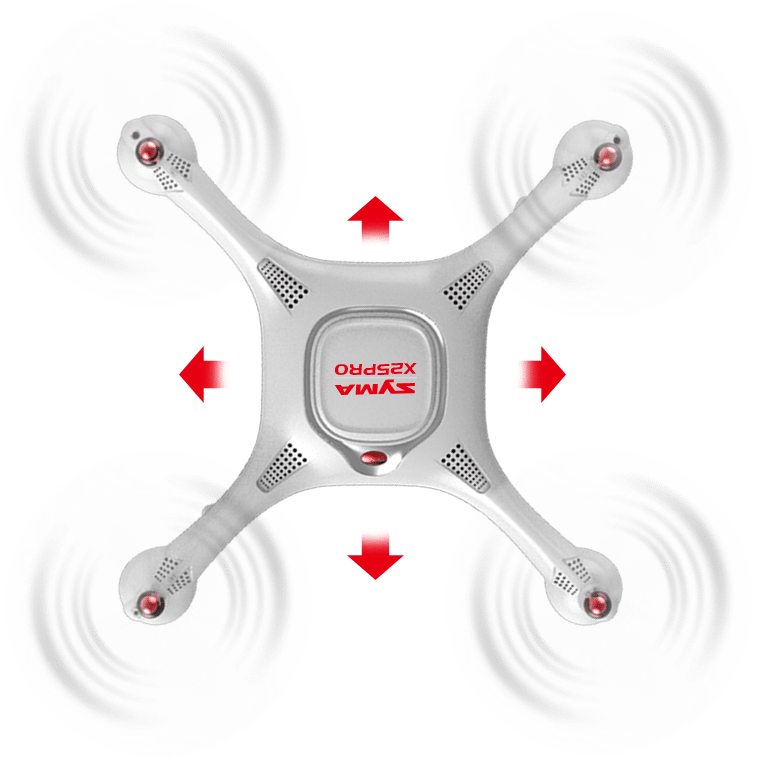
برای حرکت به جلو و یا عقب میبایست فعالیت موتورها و ملخ ها متناسب با نیاز خلبان کاسته شود. برای همین زمانی که دستور حرکت به راست را میدهید، ملخهای سمت راست با کمی کاهش عملکرد پرنده را به سمت راست هدایت میکنند. حرکت کوادکوپتر به سمت راست بر اثر اعمال نیروی ملخ های سمت چپ میباشد که نیروی بیشتری از ملخ های سمت راست اعمال میکنند! همین عامل باعث حرکت به سمت راست میشود. این فرایند دقیقا برای تغییر جهت پرنده به مابقی جهت ها نیز رخ میدهد.
Yaw Maneuvers
مسئله Yaw کمی پیچیده است! آیا تا به حال به دلیل وجود یک ملخ روی دم هلیکوپترها فکر کرده اید؟ وجود این ملخ به منظور جلوگیری از چرخش بدنه هلیکوپتر میباشد. این ملخ از ایجاد واکنش گشتاور بر روی بدنه هلیکوپتر جلوگیری میکند و در نهایت جلوی چرخش بدنه هلیکوپتر را میگیرد.
در یک پرنده با چهار بازو و چهار ملخ نیز این مسئله وجود دارد. زمانی که دو پروانه در جهت عقربه های ساعت و در طرف دیگر دو پروانه در خلاف جهت عقربه های ساعت میچرخند! ۲ گشتاور در خلاف جهت هم تولید میشود و در نهایت با از بین رفتن گشتاور کوادکوپتر جرخش اضافی نخواهد داشت.
سیستم کنترل پرواز
هنگامی که کوادکوپتر شما پرواز میکند با تغییر حرکت هر یک از ملخ ها، حرکت کواد نیز تغییر میکند. این حرکت ها و تغییرات پیرامون آن توسط اهرم های موجود روی رادیوکنترل کوادصورت میگیرد. اما وقتی شما اهرمی را روی رادیوکنترل فشار میدهید تنها یک دستور به سمت پرنده حرکت میکند و این دستور توسط سیستم کنترل پرواز به یک حرکت تبدیل شده و روی کواداعمال میشود. هدف کامپیوتر پرواز کاملا ساده و مشخص است! ساده تر کردن هماهنگی بین چهار ملخ و موتور های کوادکوپتر هدفی است که کامپیوتر های موجود در پرنده ها دنبال می کنند. این کامپیوتر ها قابلیت اتصال به چندین دستگاه و سنسور دیگر را دارند اما دستگاه اصلی که آن را به کاربران متصل میکند، گیرنده کنترل از راه دور است که با رادیوکنترل شما در ارتباط است.
کمپ
سوالات متداول
تریم کردن کوادکوپتر
در واقع هر کوادکوپتری پس از چند بار پرواز نیاز به تریم کردن خواهد داشت . اگر کوادکوپتر شما پس از بلند شدن از زمین به طرفی منحرف می شود ، کافیست آن را تریم کنید . آموزش تریم کردن کوادکوپتر های سایما در ویدیو زیر می توانید ببینید :
جمع بندی
کوادکوپترها یک روش اقتصادی بصرفه برای پیوستن به دنیای پرواز و وسایل نقلیه هوایی هستند. این محصولات گزینه مناسب و سرگرم کننده برای پرواز میباشند. کنترل و هدایت این پرنده ها بسیار ساده است! بدون شک هر کسی میتواند با کوادکوپترها لذت پرواز را بچشد.